Featured Paper: ForestFormer3D: A Unified Framework for End-to-End Segmentation of Forest LiDAR 3D Point Clouds
Authors: Binbin Xiang, Maciej Wielgosz, Stefano Puliti, Kamil Král, Martin Krůček, Azim Missarov, Rasmus Astrup
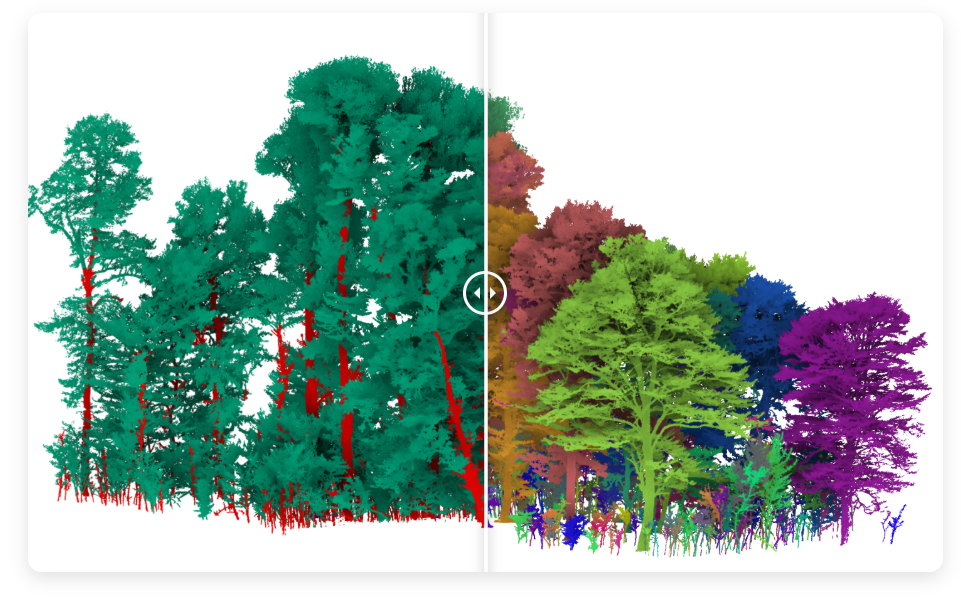
The new Climate AI Nordics Featured Paper is "ForestFormer3D: Unified 3D Forest Segmentation from LiDAR", presented as an oral at ICCV 2025 in Honolulu, Hawaii. The paper tackles a core challenge in forest remote sensing: accurate segmentation of complex forest LiDAR point clouds across diverse forest types and sensor configurations.
ForestFormer3D introduces a unified, end-to-end transformer-based framework that jointly addresses individual tree segmentation and semantic segmentation. The method integrates several key innovations, including ISA-guided query point selection to improve instance initialization, a score-based block merging strategy to handle large-scale point clouds during inference, and a one-to-many association mechanism that stabilizes training and improves segmentation quality.
The model achieves state-of-the-art performance on individual tree segmentation using the newly introduced FOR-instanceV2 dataset, which covers a wide range of forest structures and geographic regions. Importantly, ForestFormer3D demonstrates strong generalization to unseen datasets, including Wytham Woods and LAUTx, highlighting its robustness across different forest conditions and LiDAR sensor modalities.
This work represents a significant step forward for scalable and reliable 3D forest analysis, with direct relevance for forest inventory, ecological research, and forest management applications.
For more details, explore: